




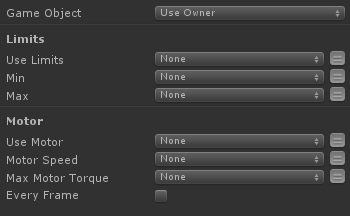
Sets the various properties of a HingeJoint2d component
Game Object
The HingeJoint2d target
Use Limits
Should limits be placed on the range of rotation?
Min
Lower angular limit of rotation.
Max
Upper angular limit of rotation
Use Motor
Should a motor force be applied automatically to the Rigidbody2D?
Motor Speed
The desired speed for the Rigidbody2D to reach as it moves with the joint.
Max Motor Torque
The maximum force that can be applied to the Rigidbody2D at the joint to attain the target speed.
Every Frame
Repeat every frame while the state is active.